Grid Projection¶
A grid projection traces a regular 2D grid of rays through the mesh and integrates a field along each ray. This can be used to make images like column density maps.
Setting up¶
A grid projection requires four parameters:
extent – the spatial range of the grid in the image plane
npix – the number of pixels (square, or
(nx, ny))bounds – the integration limits along the line of sight
center – the rotation center; required for any projection other than the default
'xy'(orNonefor an xy projection)
import numpy as np
import vortrace as vt
# Load your data
# pos: (N, 3), rho: (N,), vol: (N,)
BoxSize = 100.0
pc = vt.ProjectionCloud(
pos, rho, vol=vol,
boundbox=[0, BoxSize, 0, BoxSize, 0, BoxSize],
)
# Define the projection grid
L = 75.0
extent = [BoxSize / 2 - L / 2, BoxSize / 2 + L / 2]
bounds = [0, BoxSize]
npix = 256
# Project along z (default) -- center not required
image_xy = pc.grid_projection(extent, npix, bounds, center=None)
# Project along y (xz plane) -- center is required
center = [BoxSize / 2, BoxSize / 2, BoxSize / 2]
image_xz = pc.grid_projection(extent, npix, bounds, center, proj='xz')
#include <vortrace/vortrace.hpp>
#include <vector>
#include <array>
// pos, fields, npart loaded from your data source
double BoxSize = 100.0;
std::array<double, 6> subbox = {0, BoxSize, 0, BoxSize, 0, BoxSize};
PointCloud cloud;
cloud.loadPoints(pos, npart, fields, npart, 1, subbox);
cloud.buildTree();
// Build a grid of rays along the z-axis
double L = 75.0;
size_t npix = 256;
double cx = BoxSize / 2, cy = BoxSize / 2;
double dx = L / npix;
std::vector<Float> starts(3 * npix * npix);
std::vector<Float> ends(3 * npix * npix);
for (size_t iy = 0; iy < npix; iy++) {
for (size_t ix = 0; ix < npix; ix++) {
size_t idx = 3 * (iy * npix + ix);
double x = cx - L / 2 + (ix + 0.5) * dx;
double y = cy - L / 2 + (iy + 0.5) * dx;
starts[idx] = x; starts[idx+1] = y; starts[idx+2] = 0.0;
ends[idx] = x; ends[idx+1] = y; ends[idx+2] = BoxSize;
}
}
Projection proj(starts.data(), ends.data(), npix * npix);
proj.makeProjection(cloud, ReductionMode::Sum);
const auto& data = proj.getProjectionData();
// data[i] is the column density for ray i
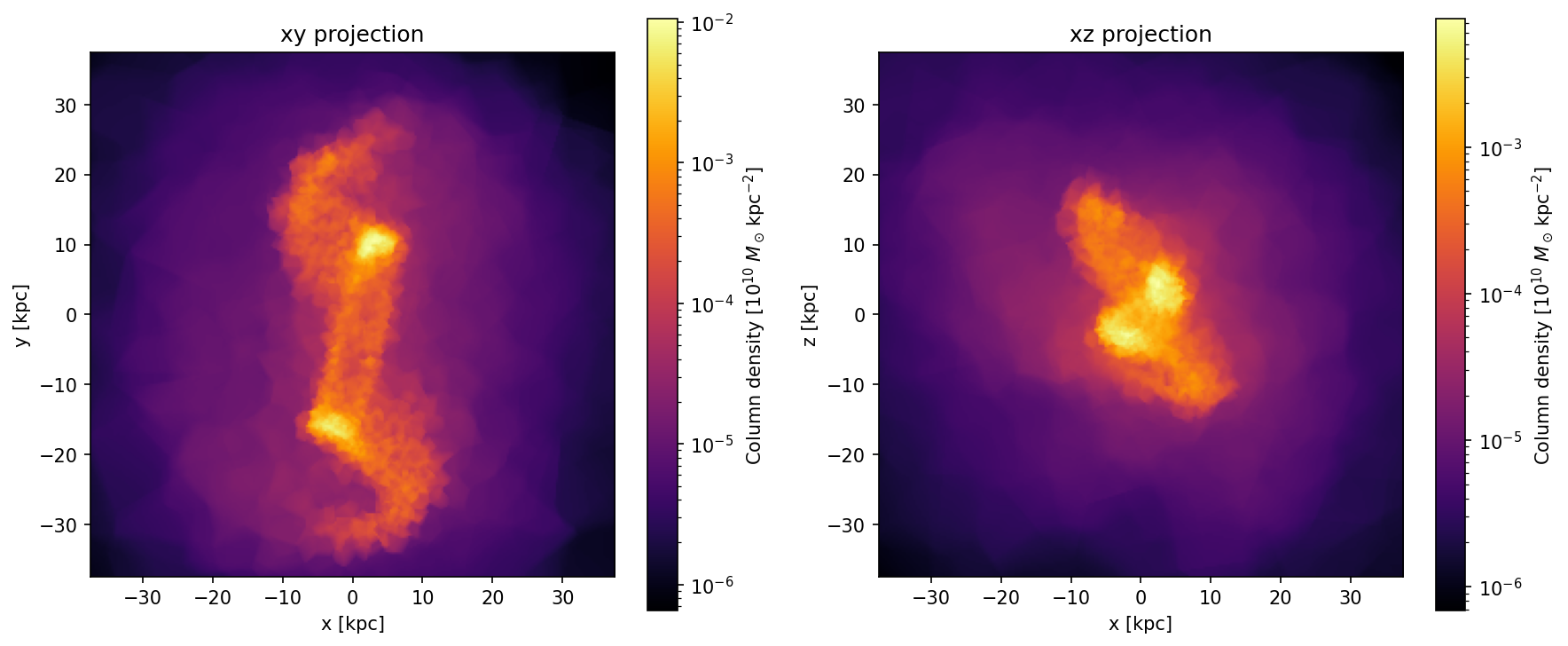
Plotting the result¶
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
vt.plot.plot_grid(
image_xy,
extent=[-L / 2, L / 2, -L / 2, L / 2],
ax=axes[0], label="Column density",
)
axes[0].set_xlabel("x")
axes[0].set_ylabel("y")
axes[0].set_title("xy projection")
vt.plot.plot_grid(
image_xz,
extent=[-L / 2, L / 2, -L / 2, L / 2],
ax=axes[1], label="Column density",
)
axes[1].set_xlabel("x")
axes[1].set_ylabel("z")
axes[1].set_title("xz projection")
Projection planes¶
In Python, the proj parameter provides a shorthand for the six Cartesian
projection planes: 'xy' (default), 'xz', 'yz', 'yx', 'zx',
'zy'. The center parameter is required for all planes except the
default 'xy'.
In C++, you construct the ray grid manually and can orient it in any direction.
See also
Custom Rotations for arbitrary Tait-Bryan rotations beyond the six Cartesian planes.